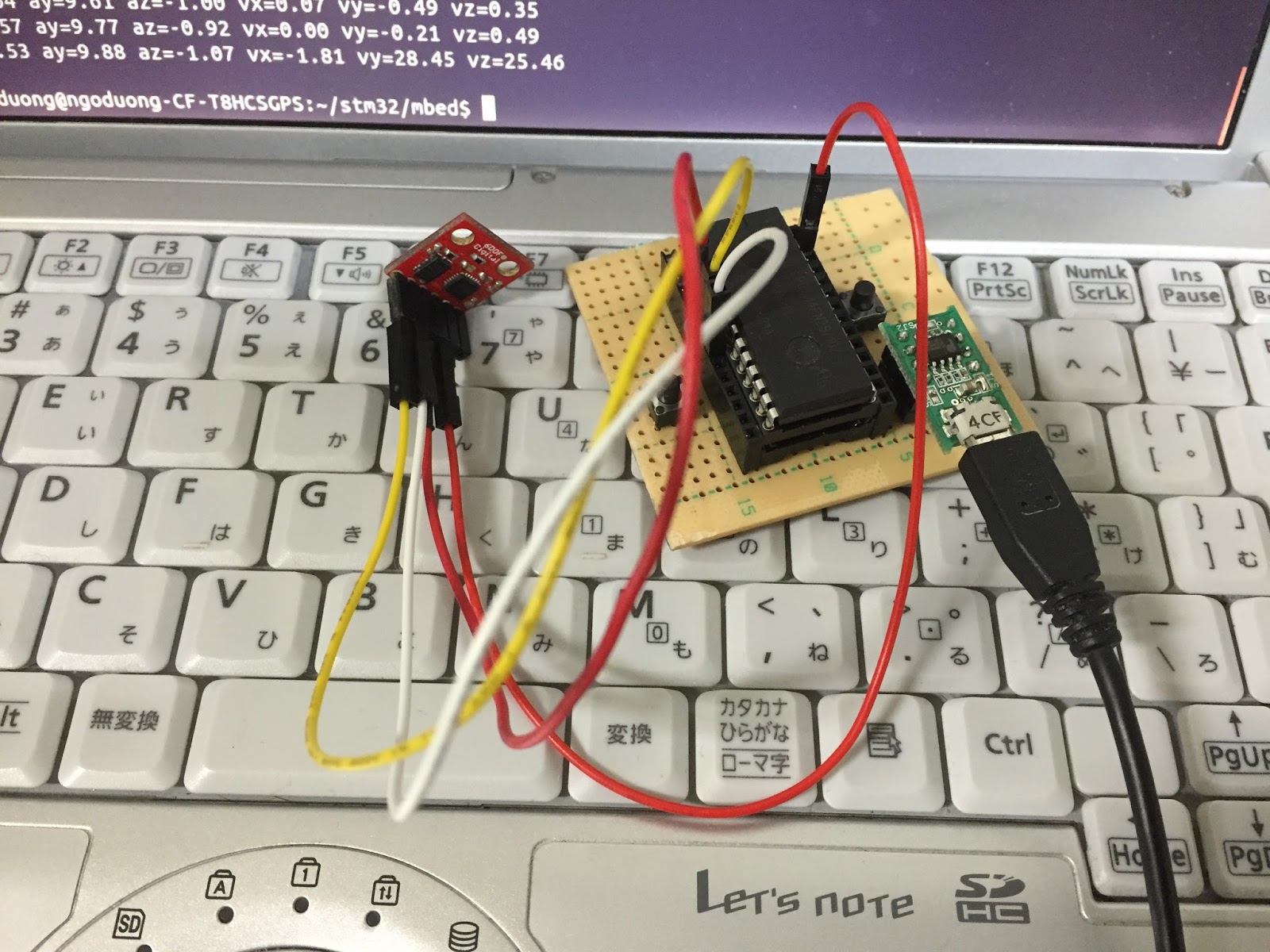
LPC 1114 + 6dof Imu sensor Mbed. Use : LPC 1114 mirocontroller and 6dof imu sensor. LPC 1114 Cortex M0. Close … The LPC1114FBD48 is an ARM Cortex-M0 microcontroller and it can operate up to 50 MHz
Code
#include “mbed.h”
#define acc_add ((uint8_t) 0xA6)
#define gyro_add ((uint8_t) 0xD0)
Serial device(dp16, dp15); // tx, rx
I2C i2c(dp5, dp27);//sda,scl
int main() {
i2c.frequency(100000);
//acc init
char cmd[2];
cmd[0] = 0x31;
cmd[1] = 0x09;
i2c.write(acc_add, cmd, 2);
wait(0.1);
cmd[0] = 0x2D;
cmd[1] = 0x08;
i2c.write(acc_add, cmd, 2);
wait(0.1);
//gyro init
cmd[0] = 0x16;
cmd[1] = 0x1A;
i2c.write(gyro_add, cmd, 2);
wait(0.1);
cmd[0] = 0x15;
cmd[1] = 0x09;
i2c.write(gyro_add, cmd, 2);
wait(0.1);
char data[6];
device.baud(9600);
int16_t acc_data_raw[3];
int16_t gyro_data_raw[3];
float acc_data[3],gyro_data[3];
while(1){
cmd[0]=0x32;
i2c.write(acc_add, cmd, 1);
wait(0.001);
i2c.read(acc_add,data, 6);
for(int i=0;i<3;i++){
acc_data_raw[i]= ((data[2*i+1] << 8) | data[2*i]);
acc_data[i]= (float)(acc_data_raw[i])*0.0383;
}
cmd[0]=0x1D;
i2c.write(gyro_add, cmd, 1);
wait(0.001);
i2c.read(gyro_add,data, 6);
for(int i=0;i<3;i++){
gyro_data_raw[i]= ((data[2*i] << 8) | data[2*i+1]);
gyro_data[i]=(float)(gyro_data_raw[i])/14.375;
}
device.printf (“ax=%2.2lf ay=%2.2lf az=%2.2lf vx=%2.2lf vy=%2.2lf vz=%2.2lfn”,acc_data[0],acc_data[1],acc_data[2],gyro_data[0],gyro_data[1],gyro_data[2]);
wait(0.2);
}
}
#define acc_add ((uint8_t) 0xA6)
#define gyro_add ((uint8_t) 0xD0)
Serial device(dp16, dp15); // tx, rx
I2C i2c(dp5, dp27);//sda,scl
int main() {
i2c.frequency(100000);
//acc init
char cmd[2];
cmd[0] = 0x31;
cmd[1] = 0x09;
i2c.write(acc_add, cmd, 2);
wait(0.1);
cmd[0] = 0x2D;
cmd[1] = 0x08;
i2c.write(acc_add, cmd, 2);
wait(0.1);
//gyro init
cmd[0] = 0x16;
cmd[1] = 0x1A;
i2c.write(gyro_add, cmd, 2);
wait(0.1);
cmd[0] = 0x15;
cmd[1] = 0x09;
i2c.write(gyro_add, cmd, 2);
wait(0.1);
char data[6];
device.baud(9600);
int16_t acc_data_raw[3];
int16_t gyro_data_raw[3];
float acc_data[3],gyro_data[3];
while(1){
cmd[0]=0x32;
i2c.write(acc_add, cmd, 1);
wait(0.001);
i2c.read(acc_add,data, 6);
for(int i=0;i<3;i++){
acc_data_raw[i]= ((data[2*i+1] << 8) | data[2*i]);
acc_data[i]= (float)(acc_data_raw[i])*0.0383;
}
cmd[0]=0x1D;
i2c.write(gyro_add, cmd, 1);
wait(0.001);
i2c.read(gyro_add,data, 6);
for(int i=0;i<3;i++){
gyro_data_raw[i]= ((data[2*i] << 8) | data[2*i+1]);
gyro_data[i]=(float)(gyro_data_raw[i])/14.375;
}
device.printf (“ax=%2.2lf ay=%2.2lf az=%2.2lf vx=%2.2lf vy=%2.2lf vz=%2.2lfn”,acc_data[0],acc_data[1],acc_data[2],gyro_data[0],gyro_data[1],gyro_data[2]);
wait(0.2);
}
}