1. Master configuration.
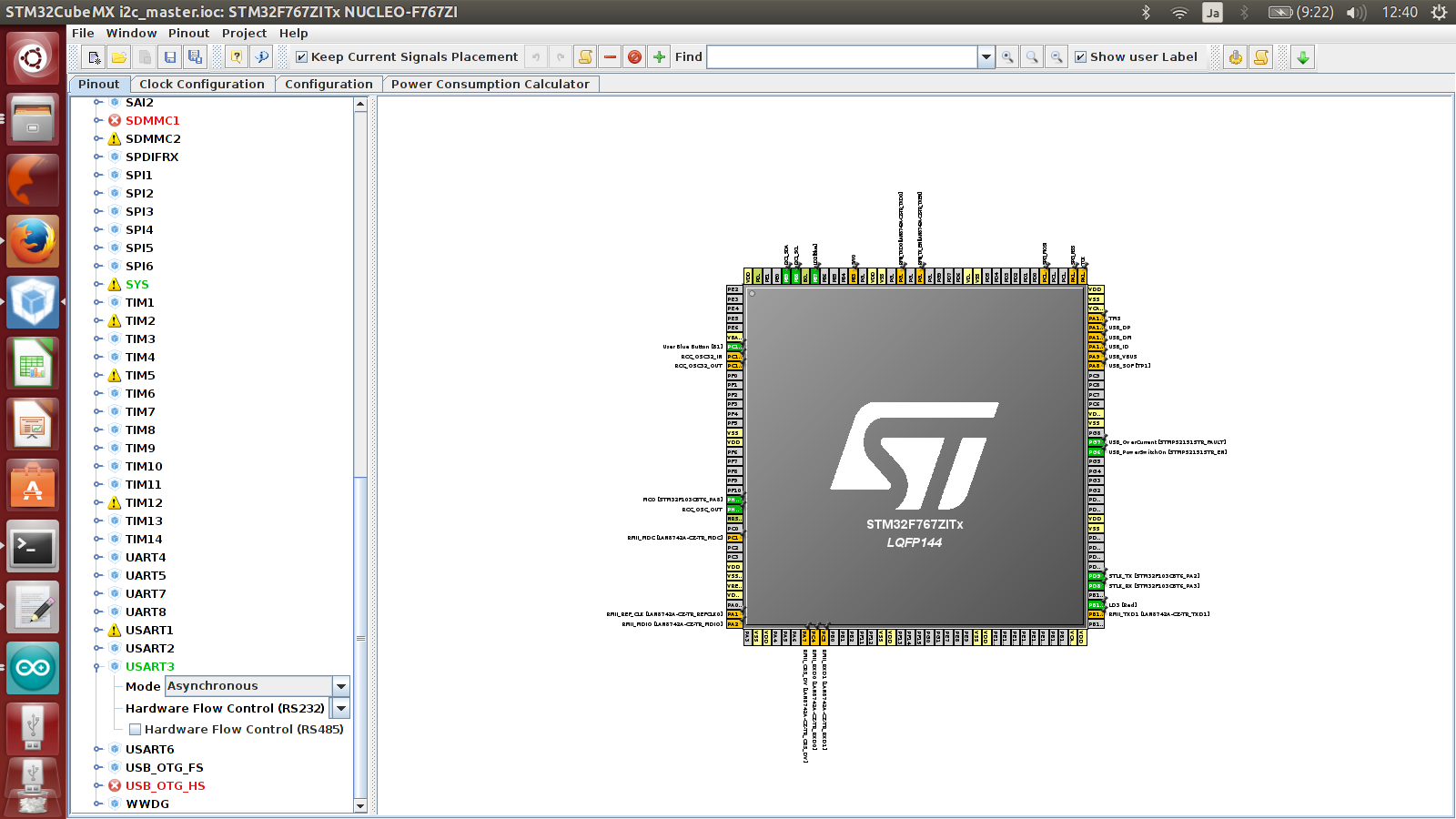
1.1 GPIO and system clock setting
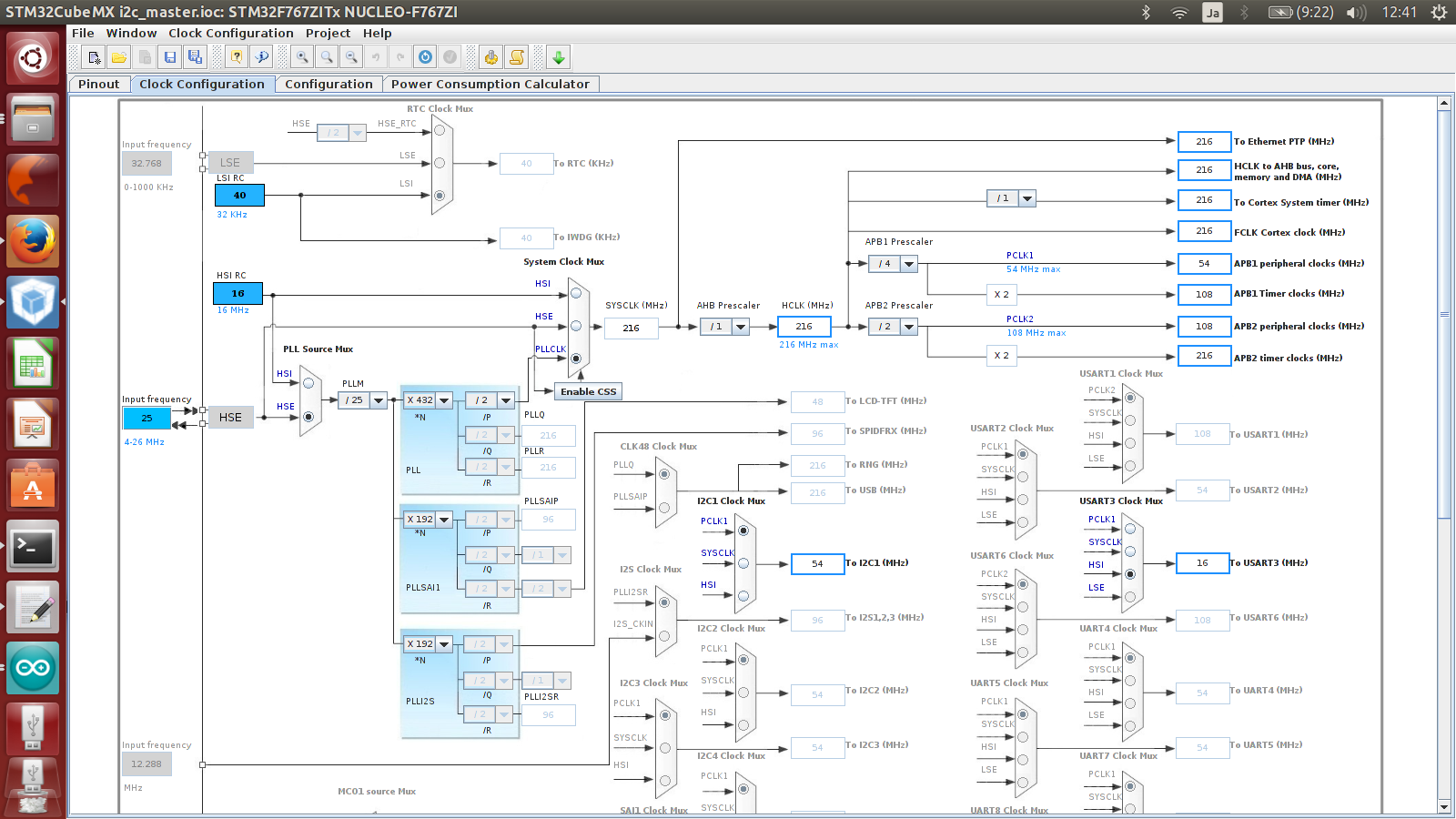
RCC clock setting RCC-> High speed clock (hse) -> crystal
Up to 216MHz
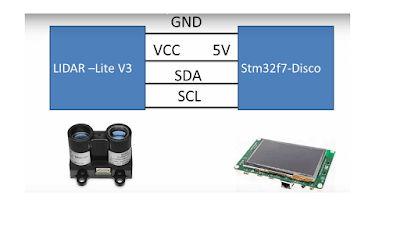
I2C setting I2C1 -> PB8 : SCL PB9 :SDA
USART setting USART3 -> asynchronous PD9 : TX PD8: RX
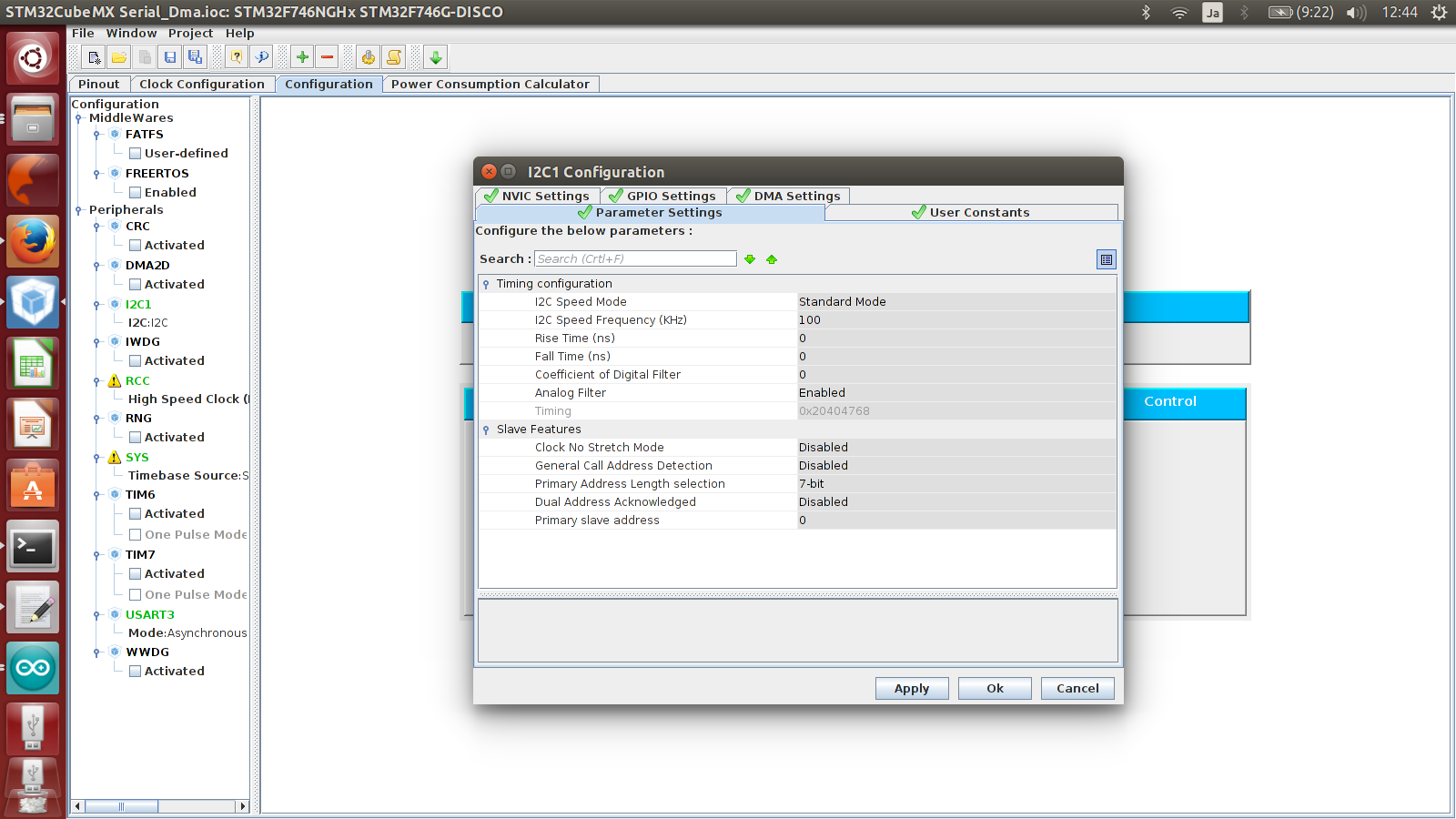
1.2 I2C and Serial setting
Frequency-> 100kHz
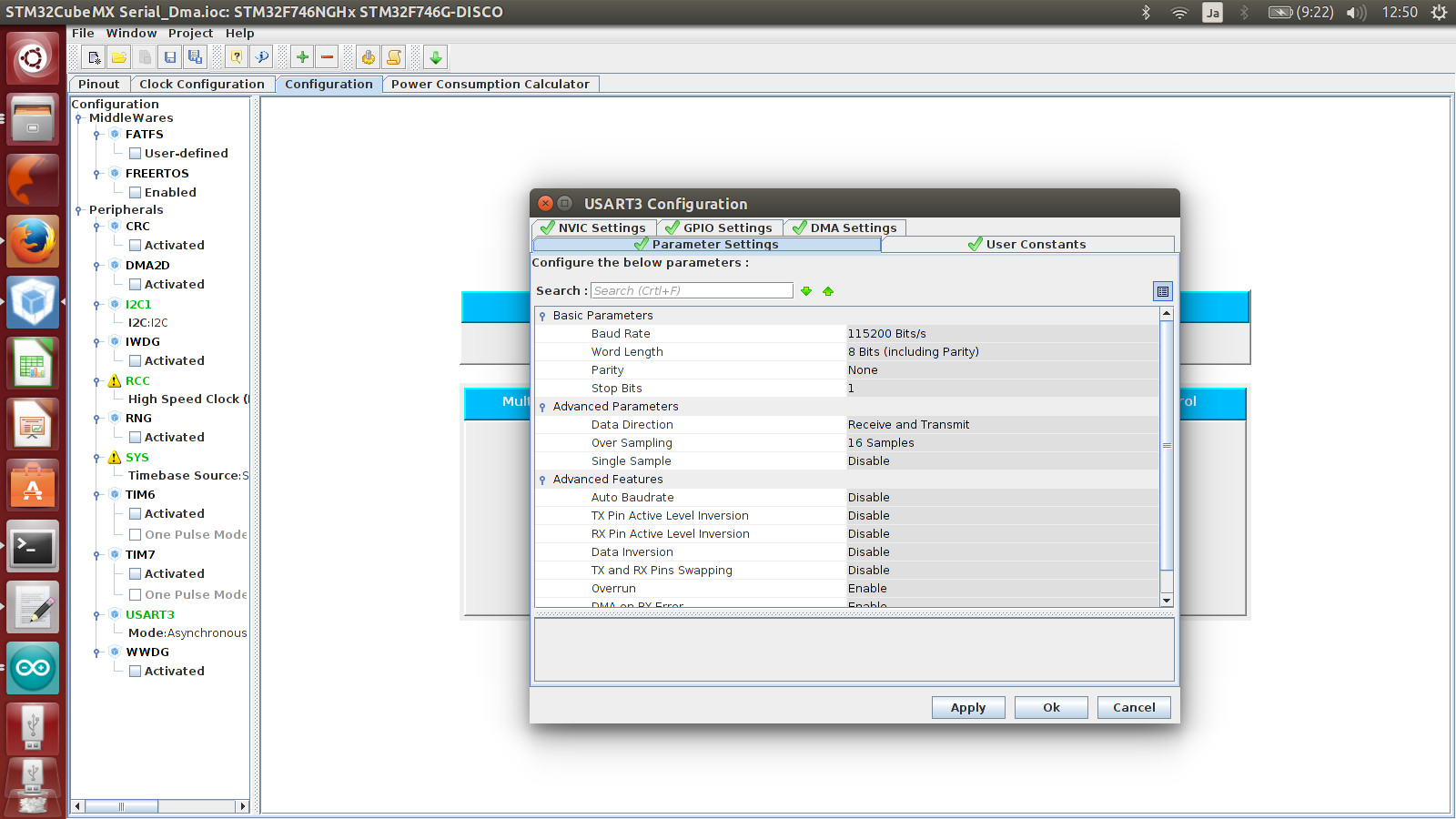
USART baud rate -> 115200
USART word length 8 Bits
2. Slave configuration
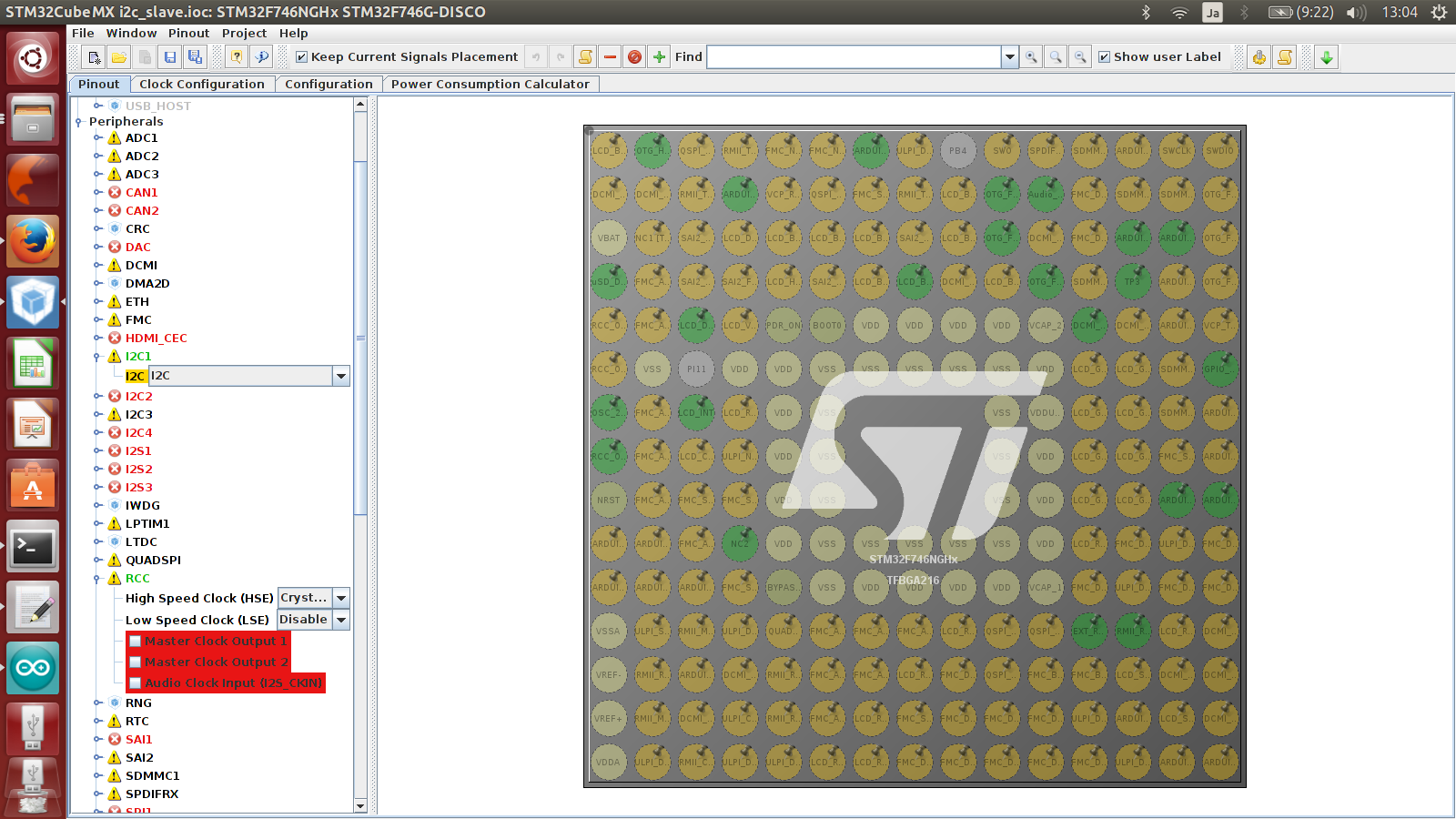
2.1 GPIO and system clock setting
Up to 216MHz
I2C setting I2C1 -> PB8 : SCL PB9 :SDA
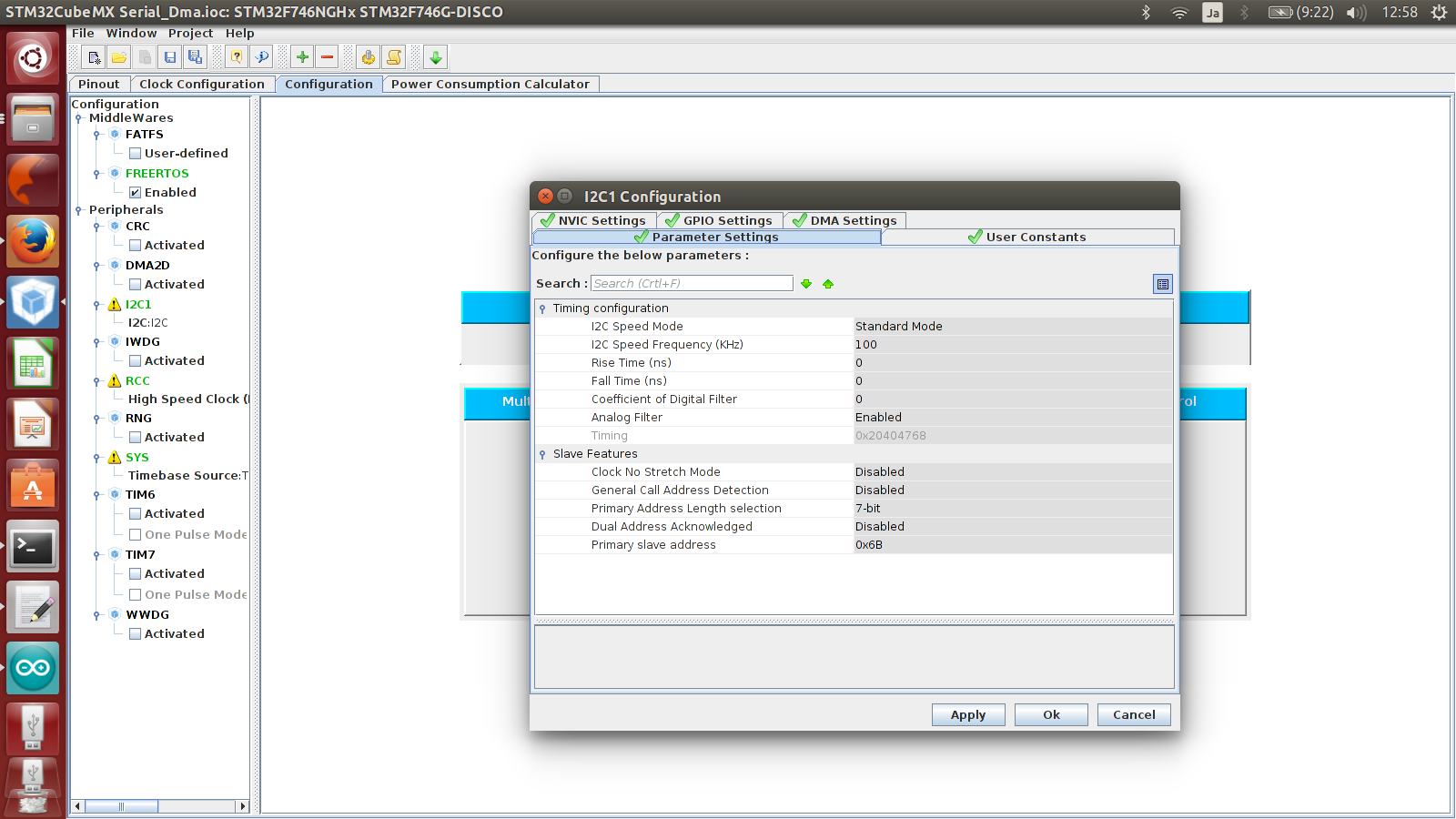
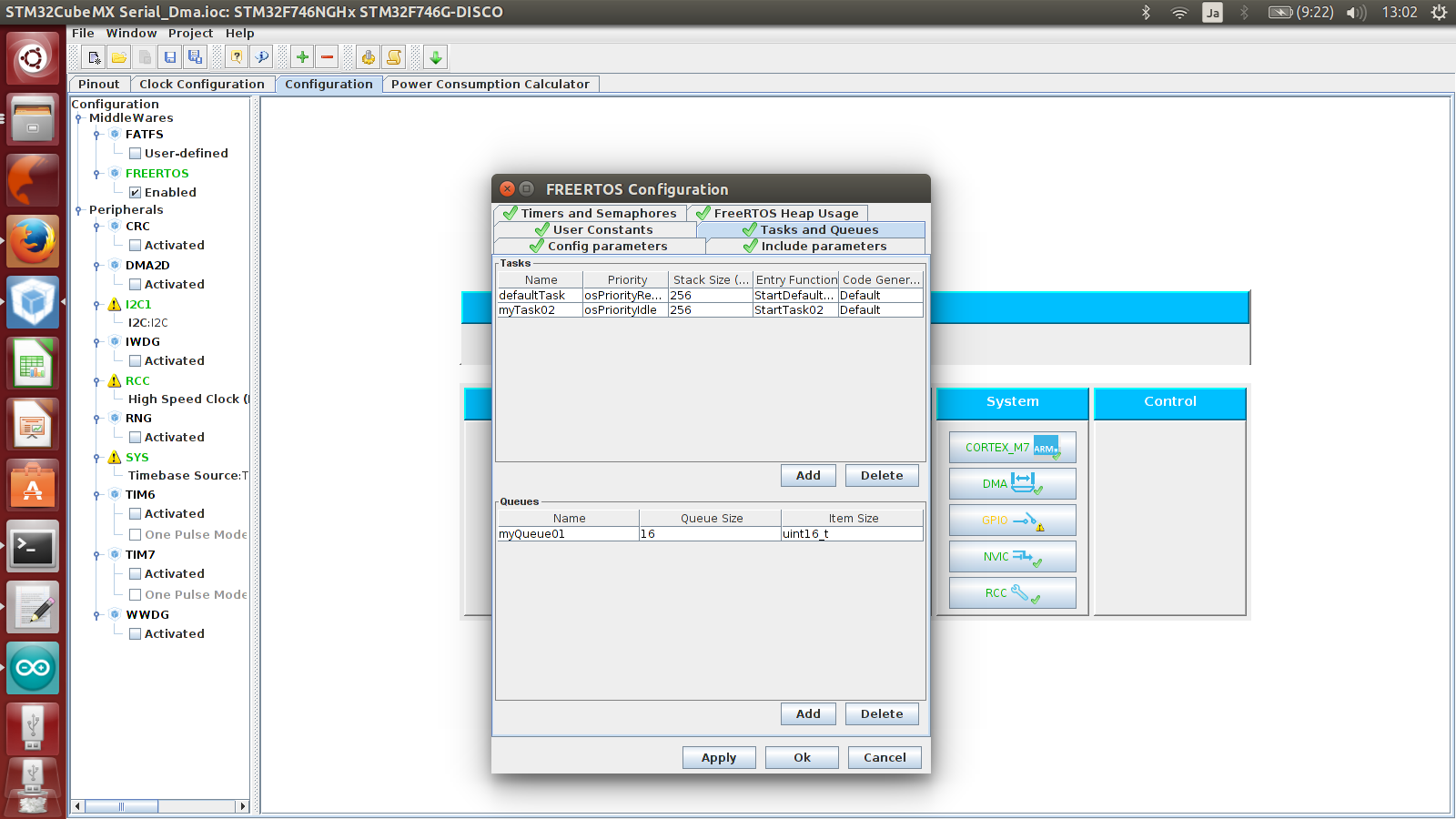
FreeRTOS -> Checked
2.2 I2C and FreeRTOS setting
Frequency-> 100kHz
Primary slave address 0x6B.
RTOS_setting -> Add task and queues
3.Generate program and edit Src/main.c file
#include “stm32f7xx_hal.h”
#define ADD 0x6b
I2C_HandleTypeDef hi2c1;
DMA_HandleTypeDef hdma_i2c1_rx;
DMA_HandleTypeDef hdma_i2c1_tx;
UART_HandleTypeDef huart3;
DMA_HandleTypeDef hdma_usart3_tx;
DMA_HandleTypeDef hdma_usart3_rx;
/* USER CODE BEGIN PV */
/* Private variables ———————————————————*/
/* USER CODE END PV */
/* Private function prototypes ———————————————–*/
void SystemClock_Config(void);
void Error_Handler(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_I2C1_Init(void);
static void MX_USART3_UART_Init(void);
/* USER CODE BEGIN PFP */
/* Private function prototypes ———————————————–*/
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration———————————————————-*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_I2C1_Init();
MX_USART3_UART_Init();
int16_t i=100;
char cmd[2];
char cmd_1[2];
char buf[40];
while (1)
{
cmd[0]=i>>8;
cmd[1]=i&0xff;
HAL_I2C_Master_Transmit(&hi2c1,ADD<<1,cmd,2,1000);
HAL_I2C_Master_Receive(&hi2c1,ADD<<1,cmd_1,2,1000);
int16_t a= cmd_1[0]<<8|cmd_1[1];
memset(buf,”,sizeof(buf));
sprintf(buf,”I send%:d..I receive:%dn”,i,a);
HAL_UART_Transmit( &huart3,buf,sizeof(buf),0x100);
i+=1;
HAL_Delay(1);
}
/* USER CODE END 3 */
}
………………………………………………..
Slave
Edit Src/main.c
#include “stm32f7xx_hal.h”
#include “stm32f7xx_hal_uart.h”
#include “stm32f7xx_hal_sdram.h”
#include “stm32f7xx_hal_ltdc.h”
#include “stm32746g_discovery.h”
#include “stm32746g_discovery_lcd.h”
#include “stm32746g_discovery_sdram.h”
#include “stm32f7xx_ll_fmc.h”
#include “string.h”
#include “cmsis_os.h”
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private variables ———————————————————*/
I2C_HandleTypeDef hi2c1;
DMA_HandleTypeDef hdma_i2c1_rx;
DMA_HandleTypeDef hdma_i2c1_tx;
osThreadId defaultTaskHandle;
osThreadId myTask02Handle;
osMessageQId myQueue01Handle;
void SystemClock_Config(void);
void Error_Handler(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_I2C1_Init(void);
void StartDefaultTask(void const * argument);
void StartTask02(void const * argument);
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration———————————————————-*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_I2C1_Init();
BSP_LCD_Init();
BSP_LCD_LayerDefaultInit(0, LCD_FB_START_ADDRESS);
BSP_LCD_LayerDefaultInit(1, LCD_FB_START_ADDRESS+(BSP_LCD_GetXSize()*BSP_LCD_GetYSize()*4));
SPI2->DR=1;
BSP_LCD_DisplayOn();
BSP_LCD_SelectLayer(0);
BSP_LCD_Clear(LCD_COLOR_BLACK);
BSP_LCD_SelectLayer(1);
BSP_LCD_Clear(LCD_COLOR_BLACK);
BSP_LCD_SetFont(&LCD_DEFAULT_FONT);
BSP_LCD_SetBackColor(LCD_COLOR_WHITE);
BSP_LCD_SetTextColor(LCD_COLOR_DARKBLUE);
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityRealtime, 0, 512);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* definition and creation of myTask02 */
osThreadDef(myTask02, StartTask02, osPriorityIdle, 0, 256);
myTask02Handle = osThreadCreate(osThread(myTask02), NULL);
osMessageQDef(myQueue01,16, uint16_t);
myQueue01Handle = osMessageCreate(osMessageQ(myQueue01), NULL);
osKernelStart();
while (1)
{
}
}
…………………………………………………………………………………….
void StartDefaultTask(void const * argument)
{
char buffer[2];
int16_t data;
for(;;)
{
HAL_I2C_Slave_Receive(&hi2c1, buffer,2,0×10000);
HAL_I2C_Slave_Transmit(&hi2c1, buffer,2,0×1000);
data=(buffer[0]<<8)|(buffer[1]);
osMessagePut(myQueue01Handle, (int16_t)data, 2);
osDelay(1);
}
/* USER CODE END 5 */
}
/* StartTask02 function */
void StartTask02(void const * argument)
{
osEvent evt;
char buf[2]=””;
int16_t data_receive;
for(;;)
{
evt = osMessageGet(myQueue01Handle,0x1000);
if (evt.status == osEventMessage) {
data_receive=evt.value.p ;
sprintf(buf,”Data receive =%d”,data_receive);
BSP_LCD_DisplayStringAt(0, LINE(6), (uint8_t *)buf, CENTER_MODE);
} else {
BSP_LCD_DisplayStringAt(0, LINE(6), (uint8_t *)”Failed”, CENTER_MODE);
}
osDelay(10);
}
/* USER CODE END StartTask02 */
}