I2C master : LPC1114
I2C slave : LPC812
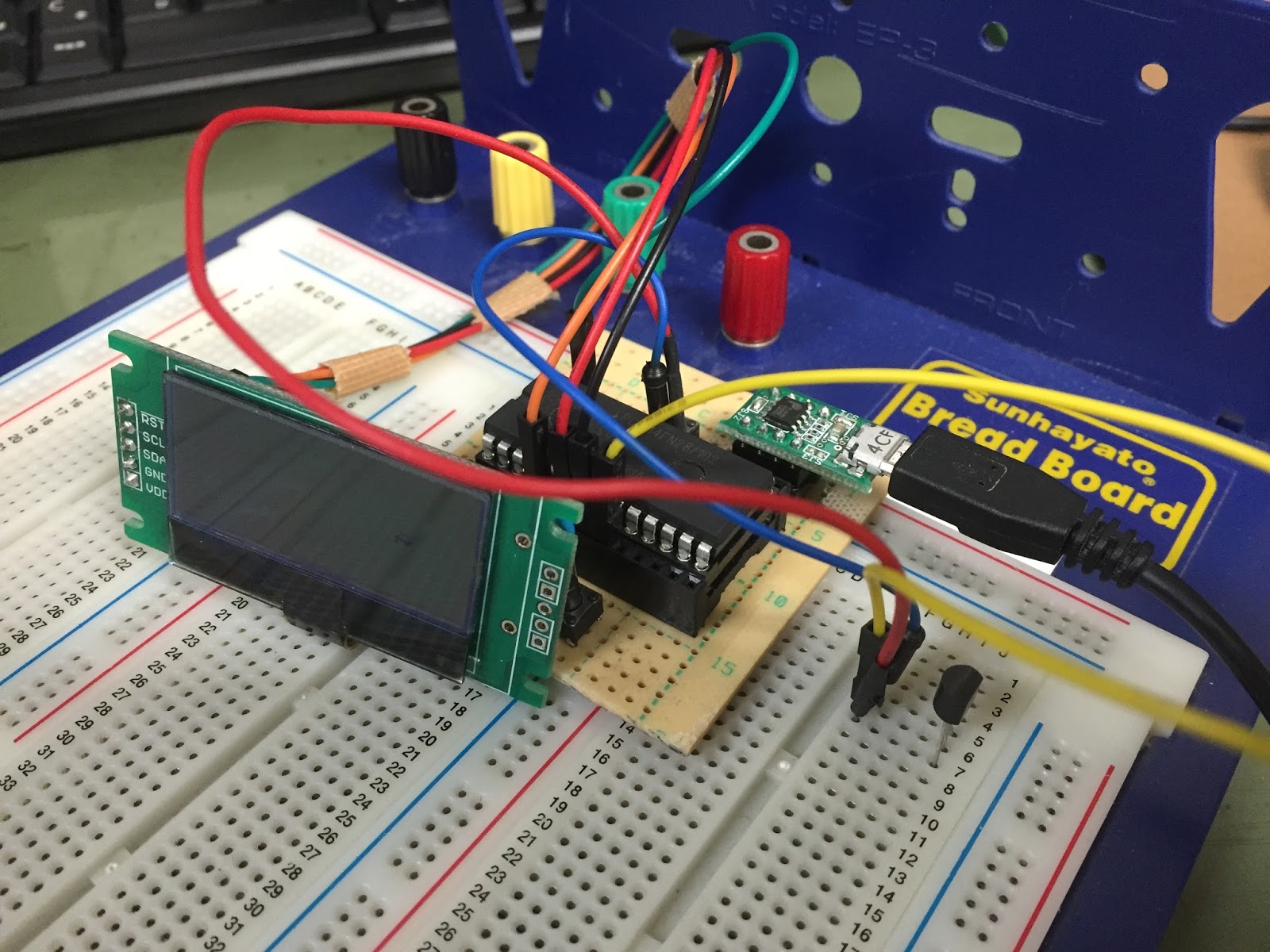
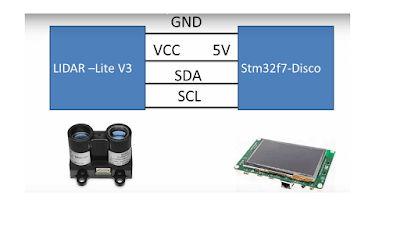
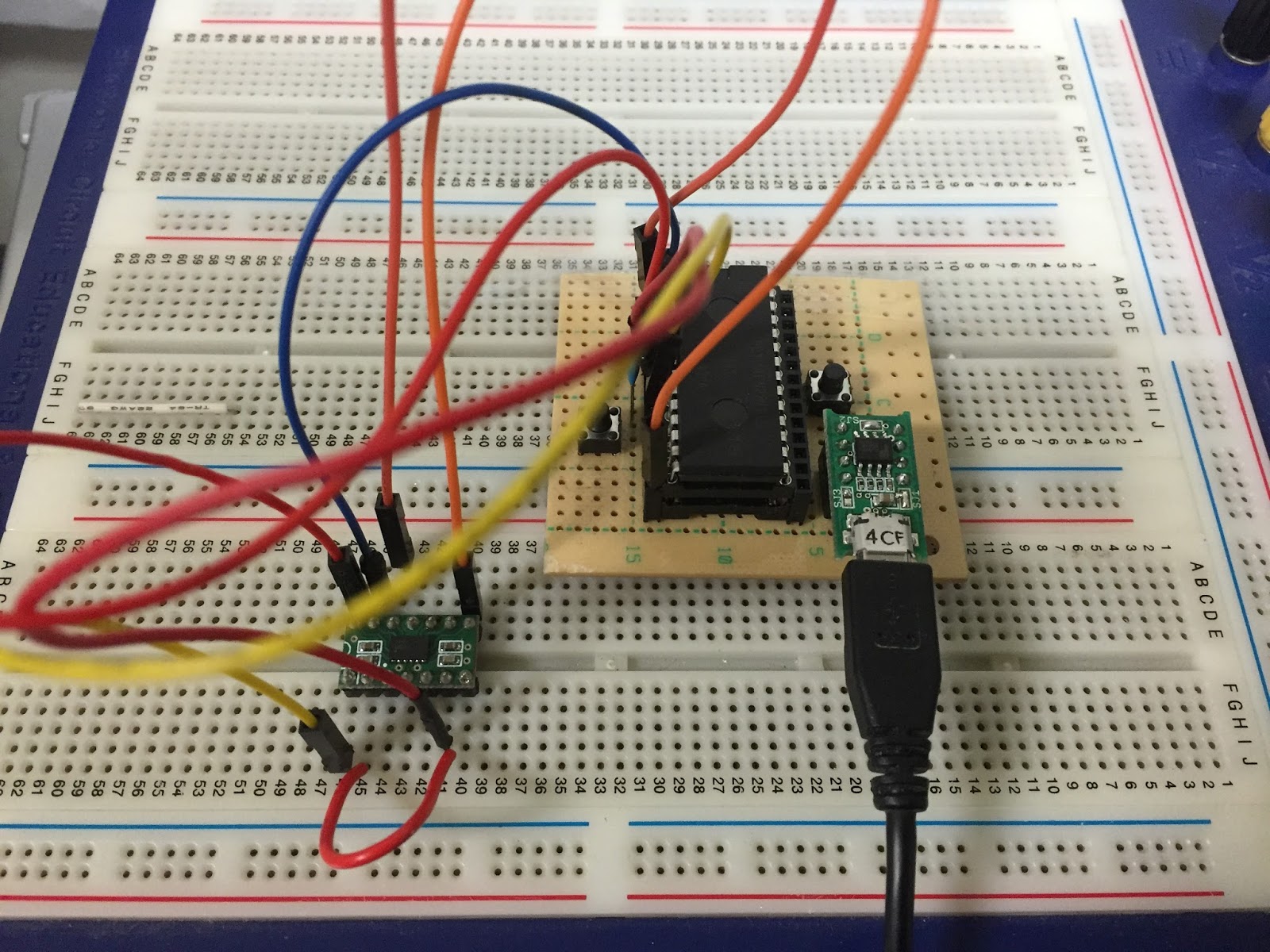
Connect GND, SDA,SCL lines of master and slave MCU. SDA and SCL are required pullup resistor.
Code
Master
#include “mbed.h”
#define slave_add ((uint8_t) 0xA0)
Serial device(dp16, dp15); // tx, rx
I2C i2c(dp5, dp27);//sda,scl
int main() {
Timer name;
i2c.frequency(100000);
char cmd[2];
char data[15];
while(1){
cmd[0]=’0′;
device.printf(“Request: %s ..”,cmd);
i2c.write(slave_add, cmd, 1);
i2c.read(slave_add,data, 5);
device.printf(“Respond: %sn”,data);
wait(1);
cmd[0]=’1′;
device.printf(“Request: %s ..”,cmd);
i2c.write(slave_add, cmd, 1);
i2c.read(slave_add,data, 5);
device.printf(“Respond: %sn”,data);
wait(1);
cmd[0]=’5′;
device.printf(“Request: %s ..”,cmd);
i2c.write(slave_add, cmd, 1);
i2c.read(slave_add,data, 6);
device.printf(“Respond:%sn”,data);
wait(1);
}
}
Slave
#include <mbed.h>
I2CSlave slave(P0_10, P0_11);
int main() {
char buf[2];
uint8_t data;
slave.address(0xA0);
while (1) {
int i = slave.receive();
for(int i = 0; i < 2; i++) buf[i] = 0;
switch (i) {
case I2CSlave::ReadAddressed:
if(data==0){
slave.write(“zero”,5);
}
else if(data==1){
slave.write(“once”,5);
}
else {
slave.write(“Error”,6);
}
break;
case I2CSlave::WriteGeneral:
break;
case I2CSlave::WriteAddressed:
slave.read(buf, 1);
data=atoi(buf);
break;
}
}
}