I do it with only gyroscope and accelerometer, if you want ,you can do the same with magnetometer.
The first you have to look at LSM9DS1 datasheet .
LSM9DS1_DATASHEET
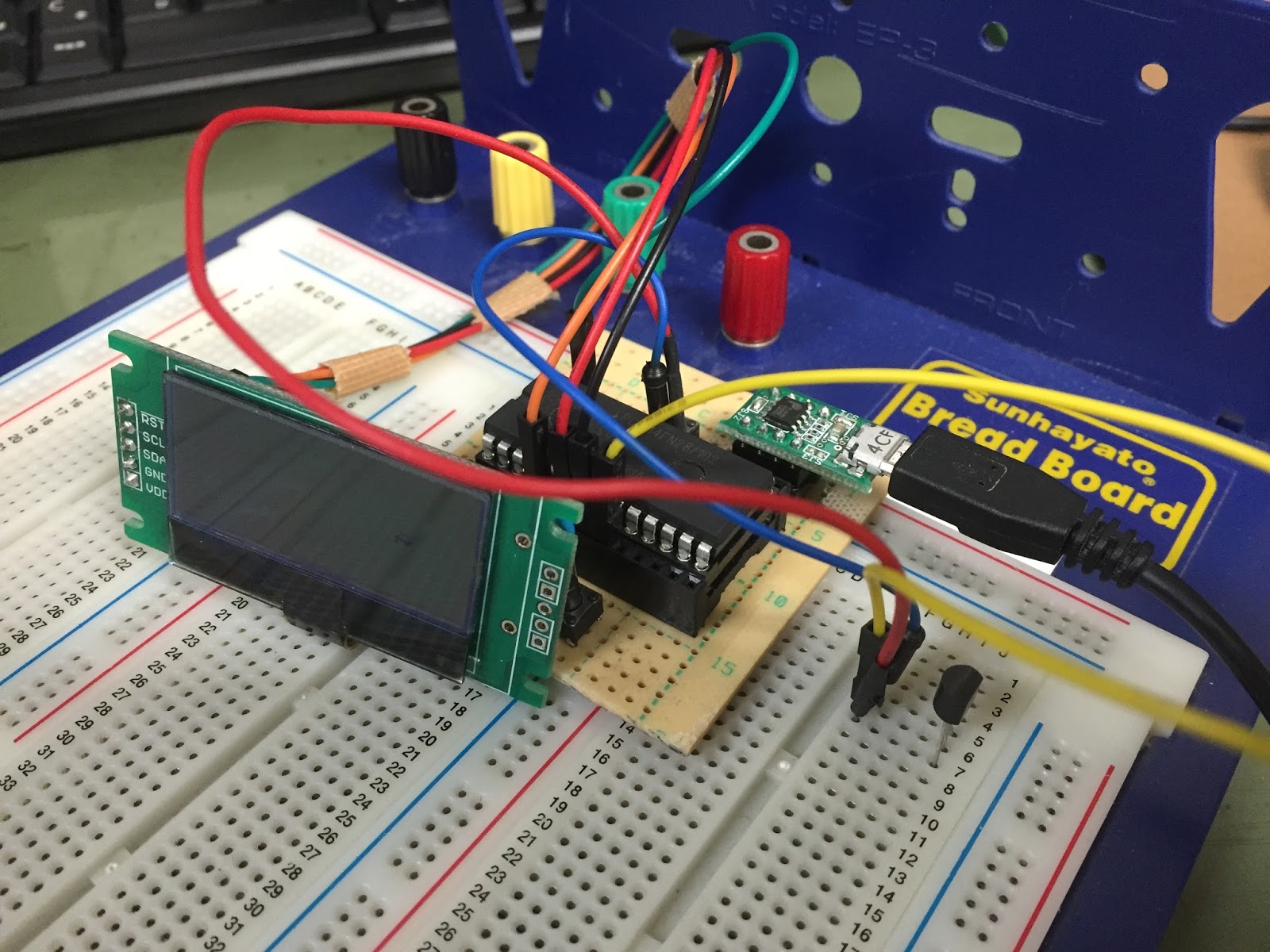
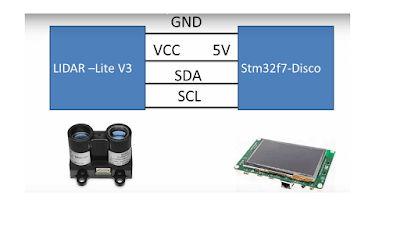
Connect
Sensor MPU
3.3V——————————–3.3 V
GND——————————-GND
SCL———————————PB_8
SDA——————————–PB_9
1. Pin out setting
RCC -> High speed clock -> Crystal ceramic resonator
Up system clock to 216Mhz
I2C1 -> I2C check


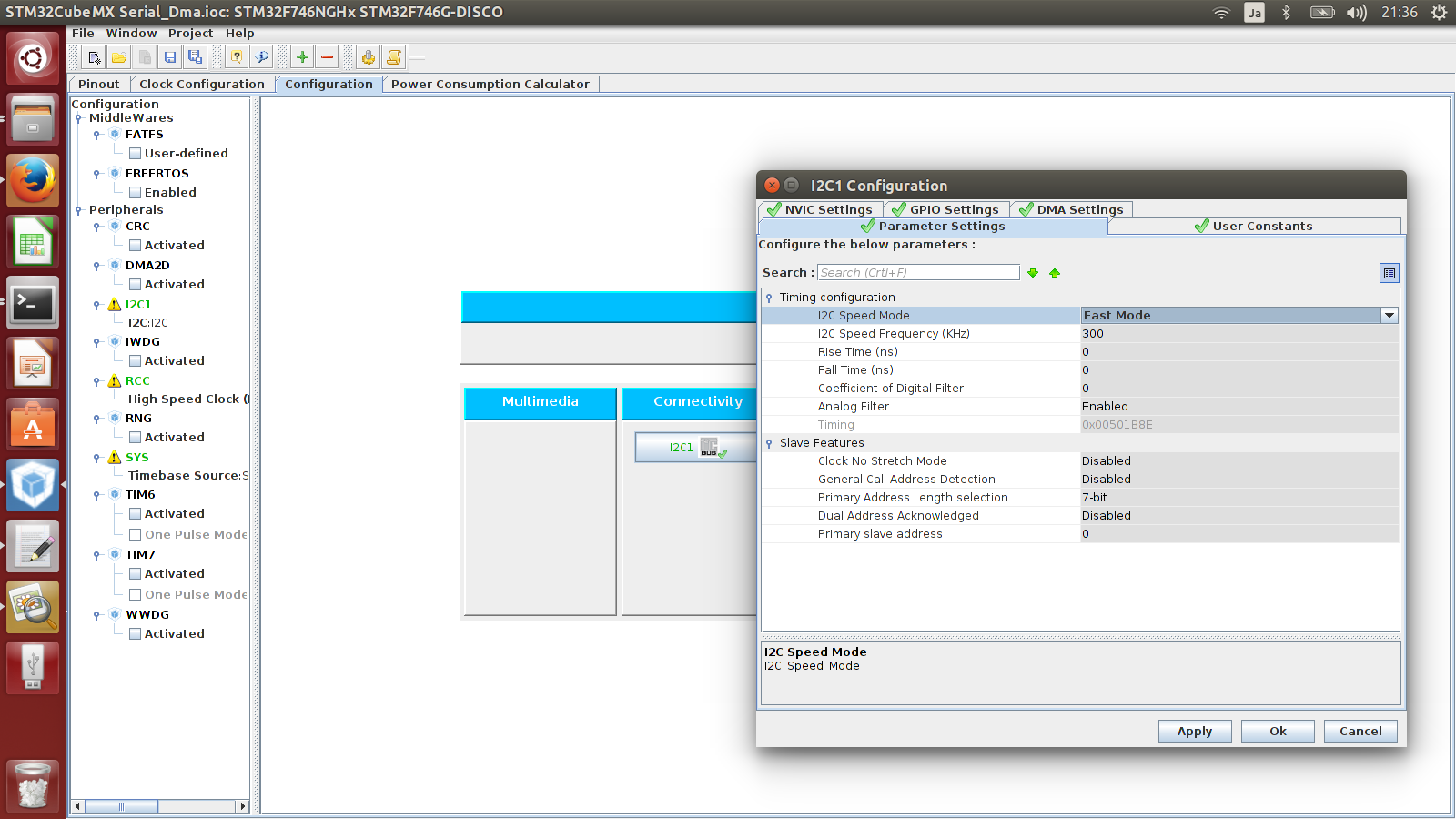
2. I2C configuration
I2C speed mode -> High speed mode
I2C speed frequency ->300 Hz
Address length -> 7bit
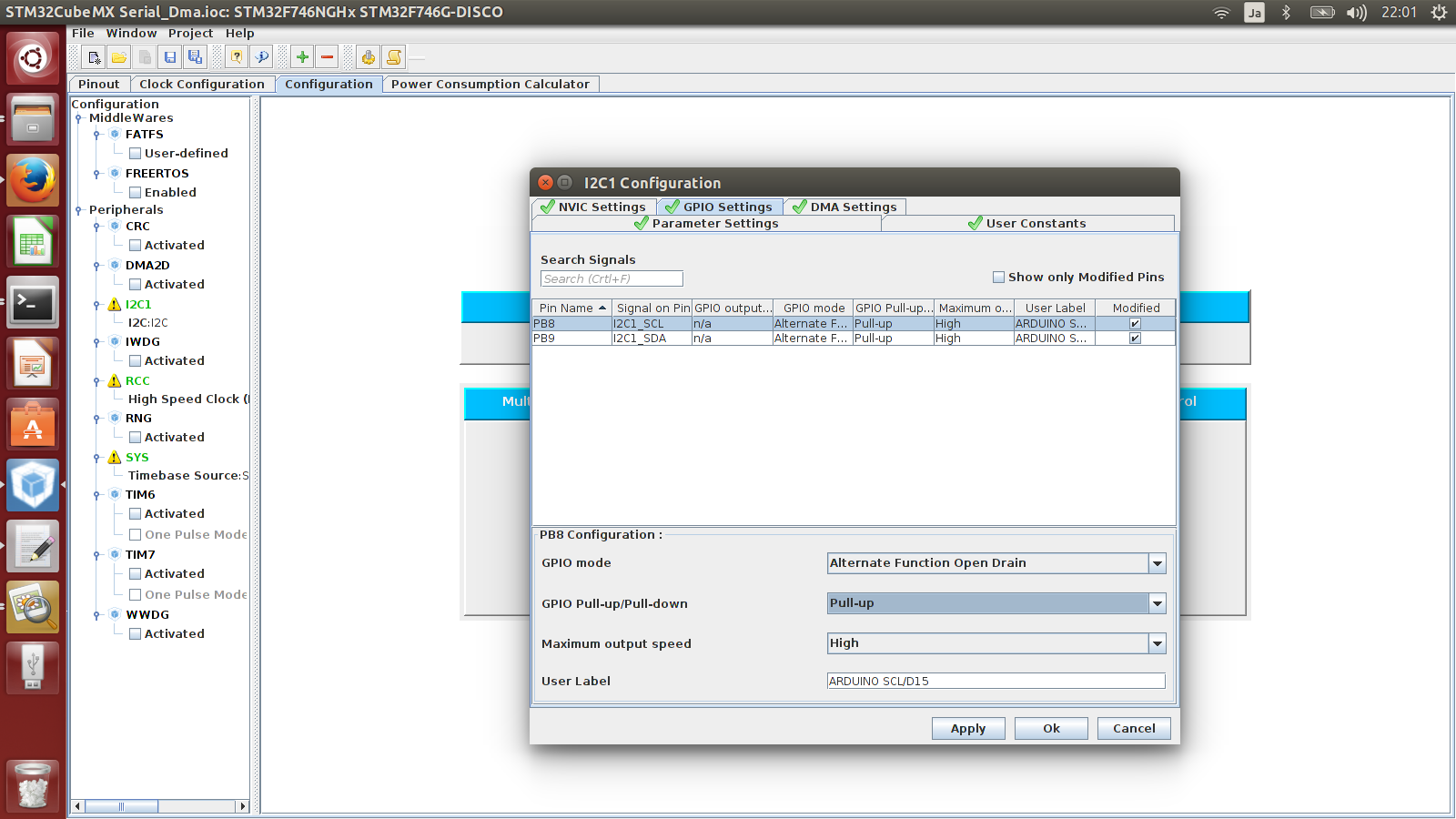
Pull up GPIO PB_8 and PB_9
3. Source generation and edition
After generated the source you add in Src/main.c file
#include “stm32f7xx_hal.h”
#include “stm32f7xx_hal.h”
#include “stm32f7xx_hal_uart.h”
#include “stm32f7xx_hal_sdram.h”
#include “stm32f7xx_hal_ltdc.h”
#include “stm32746g_discovery.h”
#include “stm32746g_discovery_lcd.h”
#include “stm32746g_discovery_sdram.h”
#include “stm32f7xx_ll_fmc.h”
#define ACT_THS 0x04
#define ACT_DUR 0x05
#define INT_GEN_CFG_XL 0x06
#define INT_GEN_THS_X_XL 0x07
#define INT_GEN_THS_Y_XL 0x08
#define INT_GEN_THS_Z_XL 0x09
#define INT_GEN_DUR_XL 0x0A
#define REFERENCE_G 0x0B
#define INT1_CTRL 0x0C
#define INT2_CTRL 0x0D
#define WHO_AM_I_XG 0x0F
#define CTRL_REG1_G 0x10
#define CTRL_REG2_G 0x11
#define CTRL_REG3_G 0x12
#define ORIENT_CFG_G 0x13
#define INT_GEN_SRC_G 0x14
#define OUT_TEMP_L 0x15
#define OUT_TEMP_H 0x16
#define STATUS_REG_0 0x17
#define OUT_X_L_G 0x18
#define OUT_X_H_G 0x19
#define OUT_Y_L_G 0x1A
#define OUT_Y_H_G 0x1B
#define OUT_Z_L_G 0x1C
#define OUT_Z_H_G 0x1D
#define CTRL_REG4 0x1E
#define CTRL_REG5_XL 0x1F
#define CTRL_REG6_XL 0x20
#define CTRL_REG7_XL 0x21
#define CTRL_REG8 0x22
#define CTRL_REG9 0x23
#define CTRL_REG10 0x24
#define INT_GEN_SRC_XL 0x26
#define STATUS_REG_1 0x27
#define OUT_X_L_XL 0x28
#define OUT_X_H_XL 0x29
#define OUT_Y_L_XL 0x2A
#define OUT_Y_H_XL 0x2B
#define OUT_Z_L_XL 0x2C
#define OUT_Z_H_XL 0x2D
#define FIFO_CTRL 0x2E
#define FIFO_SRC 0x2F
#define INT_GEN_CFG_G 0x30
#define INT_GEN_THS_XH_G 0x31
#define INT_GEN_THS_XL_G 0x32
#define INT_GEN_THS_YH_G 0x33
#define INT_GEN_THS_YL_G 0x34
#define INT_GEN_THS_ZH_G 0x35
#define INT_GEN_THS_ZL_G 0x36
#define INT_GEN_DUR_G 0x37
///////////////////////////////
// LSM9DS1 Magneto Registers //
///////////////////////////////
#define OFFSET_X_REG_L_M 0x05
#define OFFSET_X_REG_H_M 0x06
#define OFFSET_Y_REG_L_M 0x07
#define OFFSET_Y_REG_H_M 0x08
#define OFFSET_Z_REG_L_M 0x09
#define OFFSET_Z_REG_H_M 0x0A
#define WHO_AM_I_M 0x0F
#define CTRL_REG1_M 0x20
#define CTRL_REG2_M 0x21
#define CTRL_REG3_M 0x22
#define CTRL_REG4_M 0x23
#define CTRL_REG5_M 0x24
#define STATUS_REG_M 0x27
#define OUT_X_L_M 0x28
#define OUT_X_H_M 0x29
#define OUT_Y_L_M 0x2A
#define OUT_Y_H_M 0x2B
#define OUT_Z_L_M 0x2C
#define OUT_Z_H_M 0x2D
#define INT_CFG_M 0x30
#define INT_SRC_M 0x30
#define INT_THS_L_M 0x32
#define INT_THS_H_M 0x33
#define IMU_ADD 0x6B<<1
———————————————————————————————–
int main(void)
{
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
BSP_LCD_Init();
BSP_LCD_LayerDefaultInit(0, LCD_FB_START_ADDRESS);
BSP_LCD_LayerDefaultInit(1, LCD_FB_START_ADDRESS+(BSP_LCD_GetXSize()*BSP_LCD_GetYSize()*4));
BSP_LCD_DisplayOn();
BSP_LCD_SelectLayer(0);
BSP_LCD_Clear(LCD_COLOR_BLACK);
BSP_LCD_SelectLayer(1);
BSP_LCD_Clear(LCD_COLOR_BLACK);
BSP_LCD_SetFont(&LCD_DEFAULT_FONT);
BSP_LCD_SetBackColor(LCD_COLOR_WHITE);
BSP_LCD_SetTextColor(LCD_COLOR_DARKBLUE);
uint8_t cmd[1];
cmd[0]=0xC0;
HAL_I2C_Mem_Write(&hi2c1, IMU_ADD, CTRL_REG1_G, 1, cmd,1,0×100);
cmd[0]=0x00;
HAL_I2C_Mem_Write(&hi2c1, IMU_ADD, CTRL_REG2_G, 1, cmd,1,0×100);
cmd[0]=0x00;
HAL_I2C_Mem_Write(&hi2c1, IMU_ADD, CTRL_REG3_G, 1, cmd,1,0×100);
cmd[0]=0x38;
HAL_I2C_Mem_Write(&hi2c1, IMU_ADD, CTRL_REG4, 1, cmd,1,0×100);
cmd[0]=0x38;
HAL_I2C_Mem_Write(&hi2c1, IMU_ADD, CTRL_REG5_XL, 1, cmd,1,0×100);
cmd[0]=0x00;
HAL_I2C_Mem_Write(&hi2c1, IMU_ADD, CTRL_REG6_XL, 1, cmd,1,0×100);
cmd[0]=0x00;
HAL_I2C_Mem_Write(&hi2c1, IMU_ADD, CTRL_REG7_XL, 1, cmd,1,0×100);
double acc[3],gyro[3];
uint8_t data[6];
int16_t i=0,gyro_data[3],acc_data[3];
char buffer[30];
while (1)
{
HAL_I2C_Mem_Read(&hi2c1, IMU_ADD, 0x18, 1, data,6,0×100);
for(i=0;i<3;i++){
gyro_data[i]=(data[2*i+1]<<8)|data[2*i];
gyro[i]=(double)gyro_data[i]*0.00875;
}
sprintf(buffer,”vx=%2.2lf vy=%2.2lf vz=%2.2lf”, gyro[0],gyro[1],gyro[2]);
BSP_LCD_DisplayStringAt(0, LINE(3), (uint8_t *)”GyroScope:”, LEFT_MODE);
BSP_LCD_DisplayStringAt(0, LINE(4), (uint8_t *)buffer, LEFT_MODE);
HAL_I2C_Mem_Read(&hi2c1, IMU_ADD, 0x28, 1, data,6,0×100);
for(i=0;i<3;i++){
acc_data[i]=(data[2*i+1]<<8)|data[2*i];
acc[i]=(double)acc_data[i]/16384*9.8;
}
sprintf(buffer,”ax=%2.2lf ay=%2.2lf az=%2.2lf”, acc[0],acc[1],acc[2]);
BSP_LCD_DisplayStringAt(0, LINE(7), (uint8_t *)”Accelerometer:”, LEFT_MODE);
BSP_LCD_DisplayStringAt(0, LINE(8), (uint8_t *)buffer, LEFT_MODE);
HAL_Delay(200);
BSP_LCD_Clear(LCD_COLOR_WHITE);
}
}